11 Nov 2013 — How legal issues in IT will affect my future practice in relation to the BCS Code of Conduct
I found item 3.d of The Chartered Institute for IT’s (2013) Code of Conduct interesting. It states that you should “NOT disclose or authorise to be disclosed, or use for personal gain or to benefit a third party, confidential information except with the permission of your Relevant Authority, or as required by Legislation”.
04 Nov 2013 — How ethical issues in IT will affect my future practice in relation to the BCS Code of Conduct
The Chartered Institute for IT’s (2013) Code of Conduct item 2.b states you should “not claim any level of competence that you do not possess”. Before I started University I worked as a freelance web developer, this meant I regularly had to provide quotes and estimates to clients.
28 Oct 2013 — How my knowledge of social issues in IT will affect my future practice in relation to the BCS Code of Conduct
As an IT professional with Dyslexia I’ve always been aware that software, services and people in the IT profession should do their best to cater to those with any kind of disability. My reading while quick is often error prone and sometimes doesn’t convey the meaning of the text to me fully, to cope with this I have made use of the text-to-speech software built into the OS X and iOS Operating Systems. I often find myself struggling with image based PDFs and poorly formatted web pages that cause this technology to make mistakes and sometimes not work at all....
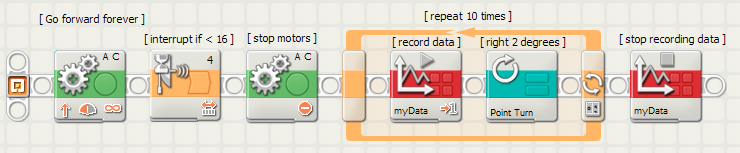
This program moves until it reaches 15cm (anything less and it hit the obstacle) then turns in small increments 10 times and logs its sensor readings, then stops logging.
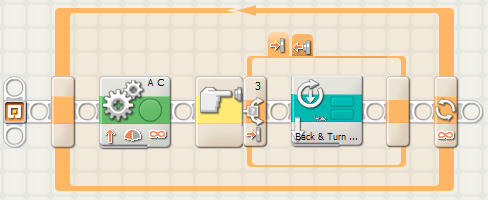
The second strategy from the sheet was a little more complicated, we start logging data imediately then move until we're in range and then turn slowly waiting .25 seconds between each turn.
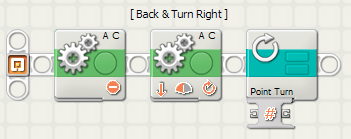
The final strategy added a turn to the left of 45° so we could scan the whole feature not just...
Use ultrasonic sensors to avoid obstacles in the arena, including walls
We conducted a test to see what ultrasonic sensor orientation would allow our roboot the best view of its suroundings, if you look below it's obvious that fixing it parallel to the floor is optimum.
0°
-30°
-60°
-90°
15cm
19
20
23
7
30cm
31
32
41
7
While I probably wont have time to investigate this I think a factor that could be more curcial to...
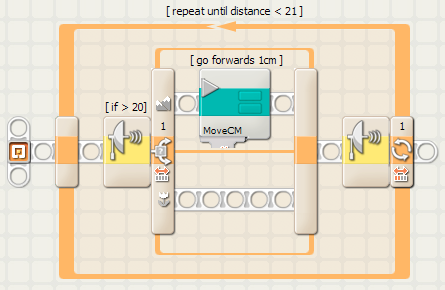
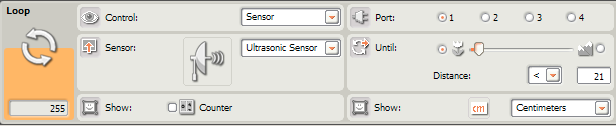
Using the first algorithm in the lecture notes I built a program to move towards an obstacle until the sensor reading below a certain value.
Algorithm One
var distance while distance <= 20cm distance = sensor reading if distance > 20cm move forwards 1cm loop
Loop Control
You can see there is one main loop, containing a sensor block and a compare block. The result of this comparision is then used to decide if the robot should move forwards or not. You...
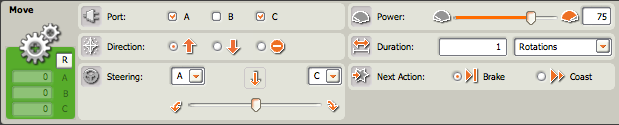
Use the challenge brief given for program 0.3 Drive Forward and its accompanying Programming Guide both located under help section as shown below to achieve the challenge brief. Also, try 04. Reverse program.
I did this fairly quickly as it only involved using one block. Here is forwards:
With its settings.
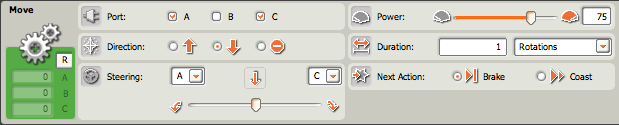
Here is backwards
With its settings.
1.2
Now that you know how to move your robot, you are required to use the move block to move your robot in a straight line